÷…ξΆΨΐ“ΜΩΎΤχΖΔ≤Φ5Ων»Υ–ΈΜζΤς»ΥΘΓΩΣΖΔ’ΏΜΙΡήΓΑ0‘ΣΙΚΓ±
 ΝΩΉ”ΈΜ
’ϊΚœ±ύΦ≠ΘΚΧΪΤΫ―σΩΤΦΦ
ΖΔ≤Φ”ΎΘΚ2024-08-19 15:58
ΝΩΉ”ΈΜ
’ϊΚœ±ύΦ≠ΘΚΧΪΤΫ―σΩΤΦΦ
ΖΔ≤Φ”ΎΘΚ2024-08-19 15:58
-
÷«‘ΣΜζΤς»ΥΖΔ≤Φ‘Ε’ςA2œΒΝ–ΚΆΝιœ§X1ΜζΤς»ΥΘ§ΆΤ≥ωΨΏ…μ÷«Ρή–¬ΤΖΓΘ‘Ε’ςA2Αϋά®»ΐΩνΜζΤς»ΥΘ§ΨΏ±ΗΝς≥©ΒΡΫ≤ΫβΡήΝΠΚΆΈ»Ε®‘ΥΕ·ΙΠΡήΘΜΝιœ§X1 «“ΜΩν¥¥–¬–‘≤ζΤΖΘ§Ω…Ή‘”…ΉιΉΑ≤Δ Ι”Ο ÷ΜζΉςΈΣΓΑΡ‘Ή”Γ±ΓΘ’β–©≤ζΤΖ’Ι ΨΝΥ÷«‘Σ‘ΎΨΏ…μ÷«ΡήΝλ”ρΒΡΦΦ θ ΒΝΠΓΘ
|
Η’Η’Θ§ΓΑΗκΓ±ΝΥ“ΜΡξΒΡ÷…ξΆΨΐΘ§÷’”Ύ¥χΉ≈ΨΏ…μ÷«Ρή–¬ΤΖά¥ΧνΩ”ΝΥΘΓ ΟΜ”– ≤Ο¥±»≥ιΫ±≥ι“ΜΧ®Θ§ΗϋΡήΧεœ÷Ε‘≤ζΤΖΒΡΉ‘–≈ΝΥΓΘ “Μ…œά¥Θ§÷…ξΆΨΐ“≤ΟΜ≤ΊΉ≈“¥Ή≈Θ§ΨΆ‘Ύ÷±≤Ξœ÷≥Γ¥νΫ®ΒΡΓΑ…ψ”Α≈οΓ±άοΘ§ΜζΤς»ΥΒ±≥Γ–ψΝΥ“Μ≤®‘Ύ”ο“τ÷ΗΝνœ¬Ε· ÷Βς“ϊΝœΒΡ≤ΌΉςΘΚ Γς2±ΕΥΌ œ÷≥Γ÷ς≥÷»ΥΘ§“≤”…¥ΥΖ§ΖΔ≤ΦΒΡ‘Ε’ςA2ΜζΤς»Υ«ΉΉ‘ΒΘΒ±ΓΘ “ΜΧΉ–ΓΝ§’–œ¬ά¥Θ§Άχ”―Ο«be likeΘΚ B’ΨΩΤΦΦ«χΝςΝΩΒΘΒ±Θ§≥œ≤ΜΈ“ΤέΘ® ÷Ε·ΙΖΆΖΘ©ΓΘ ΨΓΙήΖΔ≤ΦΜα÷Μ”–ΕΧΕΧ1–Γ ±≤ΜΒΫΘ§ΒΪ÷…ξΆΨΐΚΆΥϊ±≥ΚσΙΪΥΨ÷«‘ΣΜζΤς»Υ±οΝΥ“ΜΡξΘ§¥ΥΖ§ τ Β¥χά¥≤Μ…ΌΗ…ΜθΘ§œ»Ηχ¥σΦ“ΜοΉωΗω–ΓΉήΫαΘΚ ΖΔ≤Φ‘Ε’ςA2œΒΝ–»Υ–ΈΜζΤς»Υ »Ϊ’ΜΩΣ‘¥Νιœ§X1œΒΝ–ΜζΤς»ΥΘ§÷ς¥ρ“ΜΗωΓΑ»Υ–ΈΜζΤς»Υ»Υ»Υ‘λΓ± Ή‘―–ΙΊΫΎΡΘΉι Βœ÷ΝΩ≤ζΜ·Βϋ¥ζ…ΐΦΕΘ§Νι«… ÷Ή‘”…Ε»…ΐΦΕ÷Ν19Ηω Ε®“εΨΏ…μ÷«ΡήG1÷ΝG5―ίΫχ¬ΖœΏ Γ≠Γ≠ Ήή÷°Θ§Ω…“‘ΥΒ «–ψ≤ζΤΖΝΠΒΡΆ§ ±Θ§“≤Α―”≤ΚΥDIYΒΡΩΤΦΦ«ιΜ≥Ηχά≠¬ζΝΥΓΘ ΨΏΧεœξ«ιΘ§‘έΟ«“Μœν“Μœν’ΙΩΣά¥Ώκ~ ΟφœρΝΩ≤ζΒΡ»Υ–ΈΜζΤς»Υ ΨΆœώ÷…ξΆΨΐΉ‘ΦΚΥυΥΒΘ§Ή‘»ΞΡξ8‘¬÷–―°ΖΔ≤Φ‘Ε’ςA1“‘ά¥Θ§ΥϊΦΑΥϊ…μΚσΒΡ÷«‘ΣΜζΤς»ΥΤΡ”––©ΒΆΒςΘ§‘ΎΙΪ÷Ύ ”“ΑάοΩ…“‘ΥΒ «ΓΑΗκΓ±ΝΥ“ΜΡξΓΘ ΒΪΤδ Β’β“ΜΡξ÷–Θ§÷«‘ΣΜζΤς»Υ“Μ÷±‘ΎΓΑΟΤ…υΗ…¥σ ¬Γ±ΓΘ ÷«‘ΣΜζΤς»Υœζ έΖΰΈώΉήΨ≠άμΫΣ«ύΥ…Ε‘¥Υ≤Ι≥δΥΒΘΚ Έ“Ο«ΟΩΗω‘¬ΕΦ‘ΎΒϋ¥ζΘ§ΒΪ“ρΈΣ≤ΜΨΏ±Η…Χ”ΟΧθΦΰΘ§Υυ“‘ΟΜ”––ϊ¥ΪΓΘ Εχœ÷‘ΎΘ§Οφœρ…Χ”ΟΘ§÷«‘Σ»Ζ Β‘Ύ’β≥ΓΖΔ≤ΦΜα…œΘ§Ηχ≥ωΝΥΫΉΕΈ–‘ΒΡΥΦΩΦΚΆ¥πΑΗΓΘ Ήœ»Θ§‘Ύ≤ζΤΖΖΫΟφΘ§‘Ε’ςA2œΒΝ–ΜζΤς»ΥœύΫœ”Ύ«Α¥ζΘ§÷ς¥ρΒΡΨΆ «“ΜΗωΓΑΟφœρΝΩ≤ζΗΡΫχΓ±ΓΘ ΈΣ¥ΥΘ§÷«‘Σ¥ΥΖ§ΖΔ≤ΦΝΥ3Ων ”Ο”Ύ≤ΜΆ§≥ΓΨΑΒΡΜζΤς»ΥΘΚ ‘Ε’ςA2Θ§…μΗΏ“ΜΟΉΤΏΘ§Χε÷Ί140ΫοΘ§ «ΡήΥΪΉψ––ΉΏΒΡΫΜΜΞΖΰΈώΜζΤς»ΥΓΘ¥σΡΘ–ΆΦ”≥÷œ¬Θ§ΨΏ±ΗΝς≥©ΒΡΫ≤ΫβΡήΝΠΚΆΈ»Ε®ΒΡ‘ΥΕ·ΙΠΡήΓΘ ‘Ε’ςA2-WΘ§¬÷ Ϋ»α–‘÷«‘λΜζΤς»ΥΓΘ“ΜΩΣ≥ΓΗχ÷…ξΆΨΐΉω“ϊΝœΒΡΨΆ «ΥϋΘ§ΨΏ±ΗΕ·Χ§»ΈΈώ±ύ≈≈ΓΔΗ¥‘”Ής“Β÷¥––Θ§“‘ΦΑΥΪ±έ–≠Ά§Ής“ΒΒ»ΡήΝΠΓΘ ‘Ε’ςA2-MaxΘ§÷Ί‘ΊΧΊ÷÷ΜζΤς»ΥΘ§ΡήΙΜΑαΕ·40kg“‘…œΒΡ÷ΊΈοΓΘΗΟΩνΜζΤς»ΥΡΩ«Α¥Π”Ύ≤ζΤΖ―–ΖΔΫΉΕΈΓΘ ΨΏΧεΒΫΦΦ θœΗΫΎ…œΘ§÷«‘¥ΜζΤς»ΥΫΪΜζΤς»ΥœΒΆ≥Μ°Ζ÷ΈΣΕ·ΝΠ”ρΓΔΗ–÷Σ”ρΓΔΆ®–≈”ρΚΆΩΊ÷Τ”ρΓΘ Ε·ΝΠ”ρΖΫΟφΘ§÷«‘ΣΉ‘―–ΒΡPowerFlowΙΊΫΎΡΘΉι Βœ÷ΝΩ≤ζΜ·Βϋ¥ζ…ΐΦΕΓΘΤδ÷–Ήν«Ω–ΆΚ≈ΕνΕ®≈ΛΨΊ¥οΒΫ270NmΘ§Ζε÷Β≈ΛΨΊ¥οΒΫ512NmΓΘ ÷…ξΆΨΐ±μ ΨΘ§PowerFlow¥ΥΖ§Χα…ΐΘ§÷ς“Σ «Ω…ΩΩ–‘ΚΆΈ»Ε®–‘¥οΒΫΝΩ≤ζΦΕ±πΓΘ‘Ύœ÷≥ΓΘ§Υϊ“≤ΆΗ¬Ε’βΩνΙΊΫΎΡΘΉιΫΪΩΣΤτΕ‘Άβ έ¬τΓΘ ¥ΥΆβΘ§ΜζΤς»ΥΝι«… ÷ΒΡΉ‘”…Ε»“≤…ΐΦΕ÷Ν19ΗωΘ§Τδ÷–÷ςΕ·Ή‘”…Ε»¥οΒΫ12ΗωΘ§≤Δ“ΐ»κΝΥΜυ”ΎMEMS‘≠άμΒΡ¥ΞΨθΗ–÷ΣΚΆ ”¥ΞΨθΗ–÷ΣΦΦ θΓΘ Ι”ΟΙΛΨΏ≈Γ¬ίΥΩΘΚ ≤πΩλΒίΘΚ Η…Βψ¥©’κ“ΐœΏΒΡΨΪœΗΜνΘ§ΕΦ≤Μ‘ΎΜΑœ¬ΘΚ Η–÷Σ”ρΖΫΟφΘ§‘Ε’ςA2œΒΝ–Φ·≥…ΝΥRGBDœύΜζΓΔΦΛΙβάΉ¥οΓΔ»ΪΨΑœύΜζΒ»¥ΪΗ–ΤςΘ§“ΐ»κΉ‘Ε·Φί ΜOccupancyΗ–÷ΣΖΫΑΗΘ§Ά®ΙΐSLAMΥψΖ®Ϋχ“Μ≤ΫΧα…ΐΜΖΨ≥άμΫβΡήΝΠΓΘ Ά®–≈”ρΖΫΟφΘ§÷«‘ΣΉ‘―–ΝΥΉ®ΈΣΨΏ…μ÷«Ρή¥ρ‘λΒΡ«αΝΩΜ·ΓΔΗΏ–‘ΡήΆ®–≈ΩρΦήAimRTΓΘ œύ±»ROS»¾»ΐΖΫ÷–ΦδΦΰΘ§‘Ύ–‘ΡήΓΔΈ»Ε®–‘ΓΔœΒΆ≥≤Ω π–߬ ΚΆΝιΜν–‘Ψυ”–Χα…ΐΒΡΆ§ ±Θ§Φφ»ίΝΥROS/ROS2“―”–…ζΧ§ΓΘ AimRTΜΙΫΪ”Ύ9‘¬ΒΉΩΣ‘¥ΓΘ ΩΊ÷Τ”ρΖΫΟφΘ§ΫαΚœModel-basedΚΆLearning-basedΝΫ÷÷ΥψΖ®Θ§÷«‘ΣΫχ“Μ≤ΫΧα…ΐΝΥΜζΤς»ΥΒΡ‘ΥΕ·ΩΊ÷ΤΚΆ ”ΠΡήΝΠΓΘ≤Δ‘Λ―–ΝΥΜυ”ΎΉ‘»Μ”ο―‘÷ΗΝνΦ·«ΐΕ·ΒΡΓΔΩ…“‘ ≈δ≤ΜΆ§ΜζΤς»Υ±ΨΧεΒΡAgentOSΘ§Μυ”Ύ«ΩΜ·―ßœΑΘ§ Βœ÷ΜζΤς»ΥΦΦΡήΒΡΨΪΉΦ±ύ≈≈ΚΆΗΏ–ß÷¥––ΓΘ ΝμΆβΘ§÷«‘ΣΜΙΙΙΫ®ΝΥΟφœρΩΣΖ≈…ζΧ§ΒΡ»μΦΰΤΫΧ®AIMAΘ®AI Machine ArchitectureΘ©Θ§Η≤Η«Μζ…œΓΔ‘ΤΕΥΚΆΩΆΜßΕΥΓΘΗΟΤΫΧ®Φ·≥…ΝΥΜζΤς»Υ»μΦΰΒΡΚΥ–ΡΦΦ θΘ§Ά§ ±ΧαΙ©ΖαΗΜΒΡΕΰ¥ΈΩΣΖΔΫ”ΩΎΓΘ ΨΏ…μ÷«ΡήΦΦ θ―ίΫχ¬ΖœΏ ÷ΒΒΟΙΊΉΔΒΡ «Θ§≈δΚœΉ‘Φ“…Χ”ΟΜ·Ϋχ≥ΧΘ§÷«‘Σ¥ΥΖ§ΜΙΧα≥ωΝΥάύΥΤΉ‘Ε·Φί ΜL1-L5ΒΡΨΏ…μ÷«ΡήΦΦ θ―ίΫχ¬ΖœΏΘΚ G1÷ΝG5Θ®Τδ÷–ΓΑGΓ±÷ΗΆ®”Ο»ΥΙΛ÷«ΡήΘ©ΓΘ Τδ÷–Θ§G1ΈΣ¥ΪΆ≥Ή‘Ε·Μ·ΫΉΕΈΘ§ΜζΤς»ΥΜυ”Ύ¥σΝΩ»ΥΙΛ±ύ≈≈÷¥––»ΈΈώΘ§Η®“‘ΦρΒΞ ”ΨθΘ§Μυ±Ψ≤ΜΨΏ±ΗΖΚΜ·ΡήΝΠΓΘ G2ΫΉΕΈΘ§”–ΝΥ¥σΡΘ–ΆΒΡΦ”≥÷Θ§ΜζΤς»ΥΩΣ Φ Βœ÷“Μ¥σάύ≥ΓΨΑΒΡΩλΥΌ«®“ΤΓΘ ΖΫΖ® «Θ§’κΕ‘¥σΝΩ≤ΜΆ§≥ΓΨΑ»ΈΈώΘ§ΧαΝΕ≥ωΩ…Η¥”ΟΒΡ‘≠Ή”ΡήΝΠΘ§«““‘œύΕ‘Ά®”ΟΒΡΖΫ Ϋ Βœ÷’β–©ΡήΝΠΓΘ Ιΐ»Ξ“ΜΡξΘ§÷«‘ΣΜζΤς»Υ‘ΎG2¬ΖœΏ»ΓΒΟΝΥΫΉΕΈ–‘ΆΜΤΤΘ§ Βœ÷ΝΥΆ®”ΟΒΡΘΚΈΜΉΥΙάΦΤΡΘ–ΆUniPoseΓΔΉΞ»ΓΡΘ–ΆUniGraspΘ§ΝΠΩΊ≤εΑΈΡΘ–ΆUniPlugΒ»“ΜœΒΝ–zero-shotΚΆfew-shotΒΡΆ®”Ο‘≠Ή”ΦΦΡήΓΘ ≤ΜΙΐ¬οΘ§“‘…œΫΉΕΈΕΦΜΙ≤…”ΟΝΥ¥σΝΩ ÷ΙΛ±ύ≈≈ΓΘ ΒΫΝΥG3ΕΥΒΫΕΥΫΉΕΈΘ§ΜζΤς»Υ―ΒΝΖ¥”ΥψΖ®«ΐΕ·±δ≥… ΐΨί«ΐΕ·ΓΘ ¥Υ ±Θ§”… ÷ΙΛ…ηΦΤΗςάύ‘≠Ή”ΡήΝΠ±δΈΣ“άΩΩ¥σΝΩ ΐΨί≤…Φ·ΓΘ’β“ΜΫΉΕΈΒΡΡΩ±ξ «Θ§–Έ≥…“ΜΧΉΆ®”ΟΦΦΡή―ΒΝΖΩρΦήΓΘ ±»»γΖΔ≤ΦΜαΖ¥Η¥ΧαΒΫΒΡΓΑPPTΡήΝΠΓ±Θ§Φ¥ΉΞΓΔΖ≈ΓΔΒίΓ≠Γ≠ ÷…ξΆΨΐΧΊ“βΧα–―Θ§Β±«Α Β―ι±μΟςΘ§ΕΥΒΫΕΥ «“ΜΧθΨΏ±ΗScale up«±ΝΠΒΡ¬ΖœΏΓΘ ‘ΎG3Μυ¥Γ…œΘ§G4÷ς“Σ Βœ÷Ά®”Ο≤ΌΉς¥σΡΘ–ΆΓΘ ΨΌΗωάΐΉ”Θ§±»»γΕ‘”ΎΩΣΤΩΉ”ΓΔΩΣΟ≈Α― ÷’βΝΫΗωΕ·ΉςΘ§G3ΫΉΕΈΜΙ–η“ΣΒΞΕά≤…Φ· ΐΨίΘ§“‘―ΒΝΖ≤ΜΆ§ΒΡΦΦΡήΓΘ ΒΪΕ‘»Υάύά¥ΥΒΘ§Τδ ΒΕ·ΉςΒΡΒΉ≤ψ¬ΏΦ≠ «œύΆ®ΒΡΓΘ “ρ¥ΥΘ§G4“ΐ»κΝΥ¥σΝΩΩγ≥ΓΨΑΒΡ’φ ΒΓΔΖ¬’φ ΐΨίΘ§‘ΌΦ”…œ ±ΦδΡΘ–ΆΒ»άύΥΤΦΦ θΘ§»ΟAIάμΫβ±≥ΚσΈοάμ‘≠άμΘ§¥”Εχ÷¥––ΗϋΦ”Η¥‘”ΒΡ»ΈΈώΓΘ ÷Ν”ΎΉνΚσΒΡ÷’ΦΪΡΩ±ξΘΚAGIΓΘΕ‘ΨΏ…μ÷«Ρήά¥ΥΒΘ§÷ς“ΣΜΙ «ΡήΙΜΉΏ≥ω Β―ι “Θ§‘ΎΩΣΖ≈≥ΓΨΑΨΏ±ΗΩγ»ΈΈώΒΡΖΚΜ·ΡήΝΠΓΘ ¥”G1ΒΫG5Θ§“ΜΗωœ‘÷χ«ς Τ «ΘΚ ΐΨί–η«σ≤ΜΕœ…œ’«ΓΘ ΫΣ«ύΥ…ΆΗ¬ΕΘ§ΡΩ«Α÷«‘Σ“―Ψ≠¬θœρG3ΫΉΕΈΓΘ‘ΎG3¬ΖœΏ…œΘ§÷«‘ΣΜζΤς»ΥΜΙ–Έ≥…ΝΥ“ΜΧΉΨΏ…μ ΐΨίΖΫΑΗAIDEAΓΘ ’β «“ρΈΣΘ§ΓΑ”–Εύ…Ό»ΥΙΛΨΆ”–Εύ…Ό÷«ΡήΘ§‘ΎΨΏ…μ÷«ΡήΝλ”ρ“ά»Μ≥…ΝΔΓ±ΓΘ “≤ΨΆ «ΥΒΘ§ΗΏ÷ ΝΩΒΡ»ΥΜζ≤ΌΉς ΐΨίΖ«≥ΘΙΊΦϋΓΘ ΨΏΧεά¥ΥΒΘ§AIDEAΑϋά® ΐ≤…±ΨΧεΓΔ“Θ≤Ό…η±ΗΚΆ ΐΨίΤΫΧ®ΓΘ ΐ≤…±ΨΧε“≤ΨΆ «¬÷ ΫΓΔΉψ ΫΒ»άύ–ΆΖαΗΜΓΔΩ…ΩΩΈ»Ε®ΒΡΜζΤς»ΥΓΘ “Θ≤Ό…η±Η÷ß≥÷»Ϊ…μ”≥…δΓΔ±έ ÷–≠Ά§ΚΆΗΏΨΪ Β ±ΓΘ ΐΨίΤΫΧ®Η≤Η« ΐΨί≤…Φ·ΓΔ ΐΨί±ξΉΔΓΔ ΐΨίΙήάμΓΔΡΘ–Ά―ΒΝΖΓΔΡΘ–ΆΤά≤βΓΔΡΘ–Ά≤Ω π‘ΌΒΫ ΐΨίΜΊ¥ΪΒΡ»ΪΝ¥¬ΖΘ§÷ß≥÷SaaSΖΰΈώΚΆΥΫ”–Μ·≤Ω πΓΘ ≤ ΒΑ «Θ§Μυ”ΎAIDEAΒΡΑΌΆρΧθ’φΜζΓΔ«ßΆρΧθΖ¬’φ ΐΨίΘ§Ά§―υΩΣ‘¥ΓΘΫώΡξΥΡΦΨΕ»Θ§Η––Υ»ΛΒΡ–ΓΜοΑιΩ…“‘ΕΉΤπά¥ΝΥ~ ΓΑ»Υ–ΈΜζΤς»Υ»Υ»Υ‘λΓ± “‘ΈΣΫι…ήΆξ‘Ε’ςœΒΝ–Θ§÷«‘ΣΜζΤς»Υ“ΜΡξ“ΜΕ»ΝΝΜν¥σΜαΨΆΫα χΝΥ¬πΘΩ ≤Δ≤ΜΘΓ ÷…ξΆΨΐ“Μ…υΝνœ¬Θ§‘Ε’ςA2-WΜΚΜΚΆΤ…œά¥ΝΥ“ΜΗωΟΜΥϋΗΏΒΡ…ώΟΊΚΎœδΓΘ ”–Βψ―έ λΘ§ΚΟœώ «÷±≤ΞΉνΩΣ ΦΘ§÷…ξΆΨΐ÷ΗΜ”A2-MaxΑαΉΏΒΡΡ«Άφ“βΕυΘΚ άοΟφΒΡΕΪΈςΤΤœδΕχ≥ωΘ§ «÷«‘ΣΆΤ≥ωΒΡΝμ“ΜΩνΜζΤς»ΥΓΘ Νιœ§X1ΓΘ Β°…ζ”Ύ÷«‘ΣX-Lab Β―ι “Θ®“≤Ω…“‘ΦρΒΞάμΫβΈΣ÷«‘ΣΡΎ≤ΩΒΡ÷…ξΆΨΐ Β―ι “Θ©Θ§ «÷«‘ΣΜζΤς»ΥΉ®Ο≈ΟφœρΦΪ÷¬¥¥–¬ΚΆΟτΫίΧΫΥςΕχ…ηΝΔΒΡΓΘ ΫώΡξ6‘¬ΝΔœνΘ§10Ηω»ΥΉιΆ≈ΆΕ»κΤδ÷–Θ§≤ΜΒΫΑκΗω‘¬«ΑΗ’Η’’ΐ ΫΫΒ…ζΓΘ ”ΤΒ¬Φœώœ‘ ΨΘ§Νιœ§X1…μΨ≠ΑΌΥΛΘΚ œ÷‘Ύ“―Ψ≠ΡήΉωΒΫ±Μ¥σΝΠΆΤ»Ν“≤≤ΜΜαΥΛΒΙΝΥΓΘ Γςά¥»ΥΑΓΘ§’βάο”–»ΥΑ‘ΝηΨΏ…μ–ΓΜζΤς»ΥΘ®≤Μ «Θ© Νιœ§X1…μΗΏ1.3ΟΉΘ§Χε÷Ί–Γ”Ύ33kgΓΣΓΣ±»Τπ‘Ε’ςœΒΝ–Θ§Νιœ§œΒΝ–Ω¥Τπά¥Ηϋ–Γ«…ΝαγγΘΜΥϋΒΡΉν¥σ––ΉΏΥΌΕ»ΗΏ”Ύ2ΟΉ/ΟκΘ§ΒΞ±έΗΚ‘Ί¥σ”Ύ3kgΓΘ ΨίΫι…ήΘ§Νιœ§X1»Ϊ…μ…œœ¬ΕΦ”…ΝΫΩνΉ‘―–PowerFlowΙΊΫΎ¥νΫ®≥…Θ§Ζ÷±πΟϋΟϊΈΣPF86ΚΆPF52ΓΘ ’βΝΫΩνPowerFlowΕ‘Άβœζ έΓΘ ¥ΥΆβΘ§Νιœ§X1ΜΙΨΏ±Η÷–Ω’ΉΏœΏΓΔ δ≥ωΕΥΨχΕ‘÷Β±ύ¬κΓΔ÷ß≥÷PF-Link÷«ΡήΫ”ΩΎΒ»÷ΎΕύΙΠΡήΓΘ Υϋ»Ύ»κΝΥΡΘΩιΜ·…ηΦΤάμΡνΘ§Ω…“‘Ά®ΙΐΦρΒΞ±ßΙΩ–Έ Ϋ«αΥ…≤πΉΑΘ§”»Τδ «ΥϋΒΡΝΫ÷ΜΓΑ ÷Γ±ΓΘ “Σ÷ΣΒάΘ§Νιœ§X1ΒΡ±ξ≈δ «÷«‘ΣX-LabΉ‘―–ΒΡΝΫΗωΓΑ¥χ«ΑάΓΝΠΩΊΓΔ≥§ΒΆ≥…±ΨΓ±ΒΡΉ‘ ”ΠΆ®”ΟΦ–ΉΠΓΘ Ή‘ ”ΠΉΞΈ’Θ§Ϋω1Ηω÷ςΕ·Ή‘”…Ε»ΓΘ ΒΪΖΚΜ·–‘Κή«ΩΘ§ΉΞ…ΕΕΦ––ΓΘ …θ÷Ν «ΉάΟφ…œΤΫΧ…Ή≈ΒΡ“ΜΗυ’κΘ§“≤ΡήΈ»Έ»Φ–Τπά¥ΓΘ ΒΪΝιœ§X1ΒΡ÷¥––Τς≤ΜΫωΩ…“‘ «Ή‘ ”ΠΆ®”ΟΦ–ΉΠΘ§“≤Ω…“‘ «ΑΌ‘ΣΦΕ≥…±ΨΒΡΝυΈ§ΝΠ¥ΪΗ–ΤςΘ§¬ζΉψ≤ΜΆ§≥ΓΨΑ–η«σΒΡΡ«÷÷ΓΘ ”–Βψ“βΥΦΒΡ «Θ§Νιœ§X1Ω…“‘ΩΣΤτΓΑΜζΜζΡΘ ΫΓ±ΓΘ ΦρΒΞά¥ΥΒΘ§ΨΆ «¥ρΩΣΝιœ§X1ΒΡΡ‘Ή”Θ®άοΟφ±Ψά¥ «Ω’ΒΡΘ©Θ§Α― ÷ΜζΉΑΫχ»ΞΘ§”Ο–‘Φέ±»ΗϋΗΏΓΔΙΠΡήΗϋΖαΗΜΓΔΥψΝΠΗϋ«ΩΓΔΤ’ΦΑ¬ ΗϋΙψΒΡ ÷ΜζΘ§ά¥Β±ΥϋΒΡΡ‘Ή”ΓΘ »ΜΚσ¥σΦ“ΨΆΡήΩ¥ΒΫ“‘œ¬’βΗω”÷ΚΟ–Π”÷”–ΒψΙν“λΒΡΕ‘ΜΑΜ≠ΟφΘΚ ¥ΥΆβΘ§Νιœ§œΒΝ–ΜΙ”–ΩνΜζΤς»ΥΘΚ Ή®“Β ΐ≤…ΜζΤς»ΥX1-WΓΘ ΚΆ‘Ε’ςœΒΝ–ΒΡA2-W“Μ―υΘ§ΥϋΟ«ΕΦ «¬÷ ΫΘ§»ΜΚσ…œΑκ…μΩ……œœ¬…ΐΫΒΓΘ ≤ΜΙΐ”κ≤…―ΒΆΤ“ΜΧεΜζΤς»ΥA2-Wœύ±»Θ§X1-WΦέΗώΗϋΒΆΘ§ ”Ο”Ύ÷ΜΉω’φ Β ΐΨί≤…Φ·Θ§ΖΰΈώ‘Λ―ΒΝΖΫΉΕΈΘΜΕχA2-WΩ…ΖΰΈώ≤…Φ·ΓΔ―ΒΝΖΓΔΆΤάμΕύΗωΝς≥ΧΘ§≤ΜΫωΕ‘‘Λ―ΒΝΖ”–”ΟΘ§Ε‘fine tuning“≤”–”ΟΓΘ ≤ΜΆ§ΒΡ”Π”Ο≥ΓΨΑΩ…―Γ”Ο≤ΜΆ§ΒΡΜζΤς»ΥΫχ––≤…Φ·Θ§¥ν≈δ¬ζΉψ»Ϊ’Μ ΐΨί≤…Φ·–η«σΓΘ ΉνΚσΨΆ «¥σΦ“ΕΦΚήΙΊ–ΡΒΡΦέΗώΝΥΓΘ ΓΑ”―…ΧΕΦΚήΨμΘ§Έ“Ο«≤Μ≤Έ”κΦέΗώ’ΫΓΘΓ±ΥΒΆξ’βΨδΜΑΘ§÷…ξΆΨΐΑ¥œ¬ ÷÷–ΒΡPPT“ΘΩΊΤςΘ§ΤΝΡΜ…œ≥ωœ÷ΝΥΝιœ§X1ΒΡΦέΗώΓΣΓΣ 0‘ΣΓΘ Υϊ±μ ΨΘ§≥ΐΉ‘―–ΙΊΫΎΆβΘ§Νιœ§X1ΒΡ±ΨΧε…ηΦΤΆΦ÷ΫΓΔ»μΦΰΩρΦήΓΔ÷–ΦδΦΰ‘¥¬κΓΔΜυ¥Γ‘ΥΩΊΥψΖ®Θ§Ά≥Ά≥Φ¥ΫΪΩΣ‘¥ΓΘ ÷ς¥ρΒΡΨΆ «“ΜΗωΓΑ»Υ–ΈΜζΤς»Υ»Υ»Υ‘λΓ±ΓΘ ÷…ξΆΨΐ“≤œ÷≥ΓΗχΥϊΒΡX-Lab¥ρΝΥ≤®’–ΤΗΙψΗφΘ§ΓΑΜΕ”≠”–œκΖ®ΒΡΡξ«α»ΥΦ”»κ÷«‘ΣΘ§Φ”»κX-LabΓ±ΓΘ One More Thing ΉνΚσΘ§‘έ‘Όά¥ΦρΒΞ’ΐ ΫΫι…ή“Μœ¬÷«‘ΣΜζΤς»ΥΘ®AgiBotΘ©ΓΘ Υϋ≥…ΝΔ”Ύ2023Ρξ2‘¬Θ§÷¬ΝΠ”ΎAI+ΜζΤς»ΥΒΡ»ΎΚœ¥¥–¬Θ§“‘ΦΑ¥ρ‘λΨΏ…μ÷«ΡήΜζΤς»Υ≤ζΤΖΚΆ”Π”Ο…ζΧ§ΓΘ ¥¥ ΦΆ≈Ε”Αϋά®÷…ξΆΨΐΘ®≈μ÷ΨΜ‘Θ©Θ§ΒγΉ”ΩΤ¥σ±œ“ΒΚσΘ§œ»Κσ‘ΎOPPO―–ΨΩ‘ΚΓΔΜΣΈΣΙΛΉςΘ®“‘ΜΣΈΣΧλ≤≈…ΌΡξ…μΖί»κ÷ΑΘ©ΓΘΆ§ ±Θ§Υϊ“≤ «B’Ψup÷ςΘ§Ή‘≥Τ“Α…ζΗ÷ΧζœάΓΘ Ά§ΈΣ¥¥ Φ»ΥΒΡΘ§ΜΙ”–…œΚΘ»ΥΙΛ÷«Ρή―–ΨΩ‘Κ÷«ΜέΩΒ―χ Ήœ·ΩΤ―ßΦ“ΓΔ…œΚΘΫΜΆ®¥σ―ßΜζ–Β”κΕ·ΝΠΙΛ≥Χ―ß‘ΚΫΧ ΎψΤΈ§–¬ΓΘ »ΞΡξ8‘¬Θ§÷«‘ΣΜζΤς»ΥΆΤ≥ω ΉΩν≤ζΤΖΘΚ Ά®”Ο–ΆΨΏ…μ÷«ΡήΜζΤς»Υ‘≠–ΆΜζΘ§‘Ε’ςœΒΝ–ΒΡA1ΓΘ ΫώΧλΘ§ τ”Ύ «÷«‘ΣΜζΤς»ΥΒΎΕΰ¥Έ¥σ’≈ΤλΙΡΒΊΕ‘Άβ’Ι Ψ―–ΖΔΚΆ≤ζΤΖΫχ’ΙΓΘ ΫΊ÷ΙΒΫΡΩ«ΑΘ§÷«‘ΣΜζΤς»Υ“―Άξ≥…ΝΥA4¬÷Β»Εύ¬÷»ΎΉ ΓΘ ÷«‘ΣΙΌΖΫΜΙΆΗ¬ΕΘΚ ΫώΡξΘ§÷«‘ΣΜζΤς»Υ‘ΛΙάΖΔΜθΝΩ¥οΒΫ300Χ®Ήσ”“Θ§Τδ÷–ΥΪΉψ200Χ®Ήσ”“Θ§¬÷ Ϋ100Χ®Ήσ”“ΓΘ ±ΨΈΡά¥‘¥ΘΚΝΩΉ”ΈΜ |


‘≠¥¥άΗΡΩ




ITΑΌΩΤ

Άχ”―Τά¬έ
Ψέ≥§÷Β•ΨΪ―Γ
-

- CanonΦ―Ρήr100»κΟ≈ΦΕΈΔΒΞœύΜζ ¬Ο––Φ“”Ο―ß…ζvlog ”ΤΒΥΆάώ 4k–Γ«…±ψ–·ΑκΜ≠Ζυ ΐ¬κœύΜζ R100 18-45ΧΉΜζ ΥΆάώΚΟΈο ΙΌΖΫ±ξ≈δΓΨ≤ΜΚ§ΡΎ¥φΩ®≈δΦΰ ΆΤΦωΙΚ¬ρΧΉ≤ΆΓΩ
-
ΘΛ3299.0
ΘΛ3599.0

- SANC Δ…Ϊ27”Δ¥γ2K240Hz 1152Ζ÷«χMiniLEDΒγΨΚœ‘ ΨΤς QDΝΩΉ”ΒψΙψ…Ϊ”ρ HDR1000nitΗΏΝΝ ΒγΡ‘ΤΝΡΜS73mPro
- ‘¬œζ3000+
-
ΘΛ1049.0
ΘΛ1099.0

- ”Α≥έGeForce RTX 5060 Ρß»–V2 OC ”ΔΈΑ¥οœ‘Ω®
-
ΘΛ2898.0
ΘΛ2898.0

- “Ύ…ΪΘ®ESRΘ©ΓΨΤΜΙϊ15WΈόœΏ≥δΓΩmagsafe¥≈Έϋ≥δΒγΤςΩλ≥δiPhone17promax/16/15/14/13/12/ΜΣΈΣ ÷ΜζΕζΜζΉάΟφ≥δΒγΤς ΓΨΤΜΙϊ15WΈόœΏ≥δΓΩ–«Ω’“χΊ≠Magsafe¥≈Έϋ
-
ΘΛ25.0
ΘΛ109.0

- άϊΟώΘ®thermalrightΘ©ΕνΕ®650W TR-TG650 Ϋπ≈Τ»ΪΡΘΉι »Ϊ»’œΒΒγΫβΒγ»ί 14CM–ΓΜζ…μ ATX3.0Βγ‘¥ 80PLUSΫπ≈Τ»œ÷Λ
- ΥΆ‘υΤΖ
-
ΘΛ259.0
ΘΛ279.0
-

- ά≥Τ÷ΙΌΖΫ’ΐΤΖ–¬ΩνAI÷«Ρή”ο“τΥφ…μwifi“ΤΕ·ΈόœΏwifi6ΗΏΥΌΆχ¬γAI÷«Ρή―ΓΆχwifi≥Β‘ΊΕύΆχ«–ΜΜ¬Ζ”…Τς AIΗΏΥΌ÷«ΡήΗΏΫΉΑφΥφ…μwifi-ΑΉ…Ϊ
- »·Κσ Γ10
-
ΘΛ37.8
ΘΛ47.8
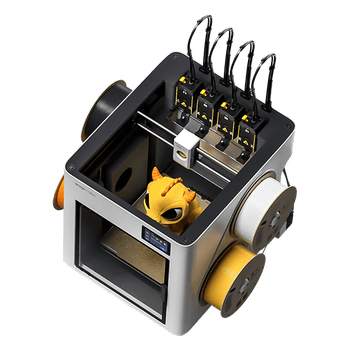
- SNAPMAKERΩλ‘λU1 3D¥ρ”ΓΜζΕάΝΔ4≈γΆΖ≤ …ΪΕύ≤ΡΝœΗΏΨΪΕ»¥σ≥Ώ¥γAI÷«ΡήΦύ≤βΦ“”ΟΉάΟφΗΏΥΌ¥ρ ÷ΑεΡΘ–Ά5±Ε ΓΝœ
-
ΘΛ5399.0
ΘΛ5999.0

- …ΝΒœΘ®SanDiskΘ©2TB Type-c USB3.2“ΤΕ·ΙΧΧ§”≤≈ΧΘ®PSSDΘ©E30ΗΏΥΌ “ΤΕ·SSD ΕΝΥΌ800MB/s Φφ»ί ÷Μζ± Φ«±ΨΒγΡ‘
- ‘¬œζ1000+
-
ΘΛ1299.0
ΘΛ1299.0

- Χζ≤Φ…άΓΨ2026–¬Ων ÷≥÷–ΓΖγ…»ΓΩΉάΟφΒγΖγ…»±ψ–· Ϋusb≥δΒγΟ‘ΡψΨ≤“τ¥σΖγΝΠ “ΡΎ÷ζΥ·ΟΏΫΒΈ¬…ώΤςΥφ…μ–Γ–ΆΒγ…» ¥χΒΉΉυ+Ι“…ΰ ΑΉ…Ϊ 3600mAh Α≤Ψ≤ΒΆ‘κΊ≠≥§≥Λ–χΚΫ
- »·Κσ Γ0.88
-
ΘΛ77.44
ΘΛ88.0

- ΝΣœκ’ϋΨ»’ΏY7000 AIΗΏΨ≤ ΒγΨΚ”ΈœΖ± Φ«±ΨΒγΡ‘(Ultra7 255HX 16G 1T RTX5060 2.5K 180Hz ΚΎ) ΙζΦ“≤ΙΧυ
- ‘¬œζ3000+
-
ΘΛ8999.0
ΘΛ8999.0
-

- »ΐΡξΕΰΑύ–ήΟ®–ΓΖγ…»Υφ…μ±ψ–· ÷≥÷–ΓΖγ…»ΉάΟφΖγ…»usbΨ≤“τΒγΖγ…»ΑλΙΪ “Υό…αΙΛΈΜ–Γ–ΆΒγΖγ…»Ι“≤±Ζγ…»Ο‘ΡψΖγ…» –ήΟ®Ε’Ε’Χ® ΫΖγ…» ΓΨ»ΐΒΒΖγΝΠΓΩ
- »·Κσ Γ19
-
ΘΛ29.8
ΘΛ48.8

- OPPO Find X9 Ultra 12GB+256GB ΦΪΒΊ±υ¥® 10±ΕΙβ±δΧλ―έ≥ΛΫΙ ≥Λ–χΚΫ ”ΈœΖ 5G ≈Ρ’’…ψ”ΑΤλΫΔ ÷Μζ–¬Μζ
- ‘¬œζ1w+
-
ΘΛ7499.0
ΘΛ7499.0
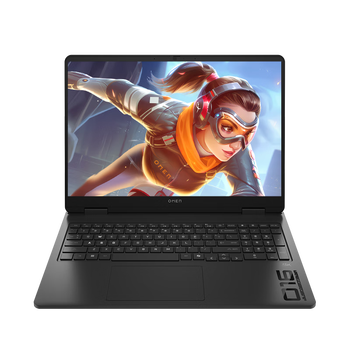
- ΜίΤ’Θ®HPΘ©ΑΒ”ΑΨΪΝι11”ΈœΖ±Ψ± Φ«±ΨΒγΡ‘ ΙζΦ“≤ΙΧυΘ®R9 8945HX RTX5060 16G 1TBSSD QHD240HzΘ©
- »·Κσ Γ300
-
ΘΛ8498.0
ΘΛ8798.0

- –ΓΟΉ÷«Ρή “Άβ…ψœώΜζ4ΥΪ…ψΑφ ≥§«ε500Άρ+500ΆρœώΥΊ…ψœώΆΖΦ“”Ο÷«ΡήΦύΩΊΈόœΏwifi ≈©¥ε ΜßΆβ ΆΞ‘Κ
- ‘¬œζ1000+
-
ΘΛ274.0
ΘΛ299.0

- ΦράΉ240≥§ΦΕ≥δΒγ ”ΟΜΣΈΣ≥δΒγΤςMate60pro ÷Μζ≥δΒγΆΖ…Ν≥δ≤εΆΖmate50pro/30/40 ”Ο»Ό“Ϊnova8/9 ΐΨίœΏ 1.0ΟΉ6AΩλ≥δœΏ
- ¬ζ2Φΰ9’έ
-
ΘΛ3.99
ΘΛ4.0
-

- π©άω65”Δ¥γΜα“ιΤΫΑε“ΜΧεΜζΜα“ιΤΫΑε¥ΞΟΰΤΝ“ΜΧεΜζΕύΟΫΧεΫΧ―ß“ΜΧεΜζΜα“ιœ‘ ΨΒγΉ”ΑΉΑεΜα“ι±ξΉΦΑφE65ΧΉΉΑ
-
ΘΛ4759.0
ΘΛ4759.0

- ΜΣ«Ω±±±§ΩνΓΨ2026Ρξ–¬ΩνΊ≠»ΪΆχ»»œζΑΌΆρΓΩάΕ―άΕζΜζΕζΦ– ΫΖ«Ι«¥ΪΒΦΩΣΖ≈ ΫΕζΜζΈόœΏ≤Μ»κΕζ‘ΥΕ·≈ή≤Ϋ”ΈœΖΆ®ΜΑΫΒ‘κ ν―Ω’ΚΎΓΨ…ΐΦΕUltraΑφΊ≠≤Μ»κΕζΨΟ¥ς φ ΓΩ Ε≈±»»ΪΨΑ“τΊ≠≥§≥Λ–χΚΫΊ≠≥§«εΆ®ΜΑ
- ¬ζ157Φθ41
-
ΘΛ58.8
ΘΛ157.8

- ΒΟΝΠΘ®deliΘ©ΥήΖβΜζa4 Φ“”ΟΑλΙΪ–Γ–Ά’’Τ§ΙΐΥήΜζΖβΥήΙΐΫΚ―ΙΡΛΖβΡΛΗ≤ΡΛΜζ Ω…”ΟΥήΖβΡΛa4ΦΑ“‘œ¬ΜΛΩ®ΡΛΥήΖβ÷Ϋ GQ403
-
ΘΛ74.9
ΘΛ74.9
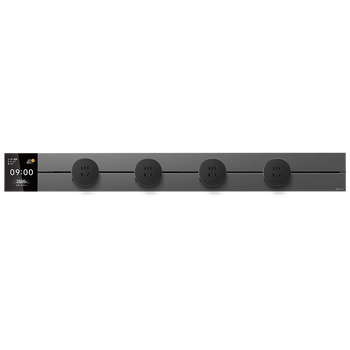
- ΙΪ≈ΘΘ®BULLΘ©¥σ Π÷«ΡήΤΝœ‘ΙλΒά≤εΉυΩ…“ΤΕ·≤εœΏΑεΙλΒά Ϋ≤ε≈≈≤Ά±ΏΙώΩΣΙΊ≤εΉυΟφΑε ΐœ‘+APPΩΊ÷Τgb3z 75cm+4ΗωΈεΩΉ
-
ΘΛ769.03
ΘΛ769.0

- ΚΘΩΒΆΰ ”Θ®HIKVISIONΘ©»Ϊœρ¬σΩΥΖγ 360Γψ ’“τ 3ΟΉ Α“τΑκΨΕ ”ΤΒΜα“ι¬σΩΥΖγ USBΦ¥≤εΦ¥”ΟΟβ«ΐΕ· Μα“ι “Ή®”Ο300U(Pro)
- »·Κσ Γ25
-
ΘΛ335.0
ΘΛ360.0


